- Language:
- 日本語
- English
研究室について
大学での研究生活を送る上で,必然的に研究室の環境が日々の生活リズムや研究への意欲に大きく関わってきます.工学部A3棟の一角に位置する私たちの研究室は,その環境の面で充実した設備を整えています.空気清浄機やこまめな掃除により清潔感を高め,観葉植物などを置くことで過ごしやすい雰囲気を作っています.研究面の設備としては,実験や論文などのデータの交換・共有を効率化するローカルネットワークの構築,そして,大規模なシミュレーション実験を実現する計算機環境を完備しています.さらに,実機実験に必要な環境が専用に用意されているため,現実世界におけるロボットの群れについても存分に探求することができます.このように充実した環境によって質の高い研究が実現し,私たちはSwarm Roboticsという先進的分野の発展に貢献します.
研究室のイベント
- 4月
- 研究室配属
- 新歓
- 5月〜7月
- 4年生勉強会
- BBQ
- 8月〜10月
- オープンキャンパス
- 大学院試験
- 大学院試験打ち上げ,合格祝い
- 10〜12月
- 研究まとめゼミ
- 忘年会
- 1月〜3月
- 卒業論文,修士論文発表会
- 追いコン
製作したロボット
私たちは実機ロボットを用いて,創発的協調行動の生成法を構成論的に研究します. 研究に用いる移動ロボットやアーム型ロボットの設計・製作は私たちの手によって行っています.これまでに培ってきた技術や経験を下に,ロボットの性能は年々向上しています.また,扱うロボットの台数も増加し続けており,より複雑な協調行動の生成を目指し研究を行っています.
自律移動ロボット
協調搬送ロボット

自律移動ロボット(ver.1)

自律移動ロボット(ver.2)
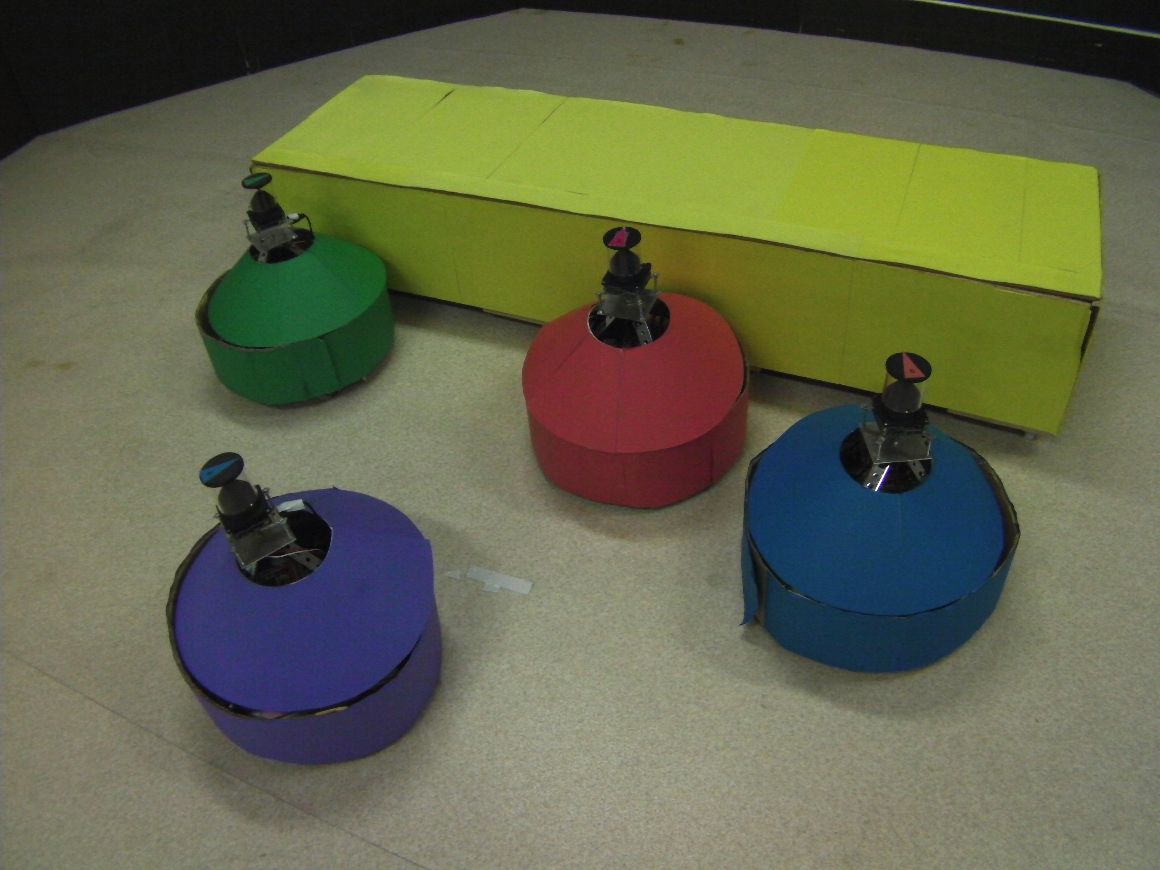
自律移動ロボット(ver.3)

自律移動ロボット(ver.4)
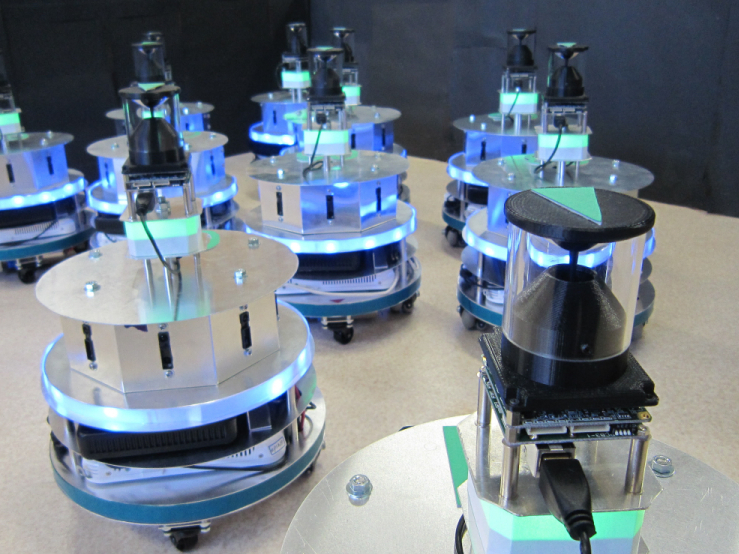
自律移動ロボット Azalea
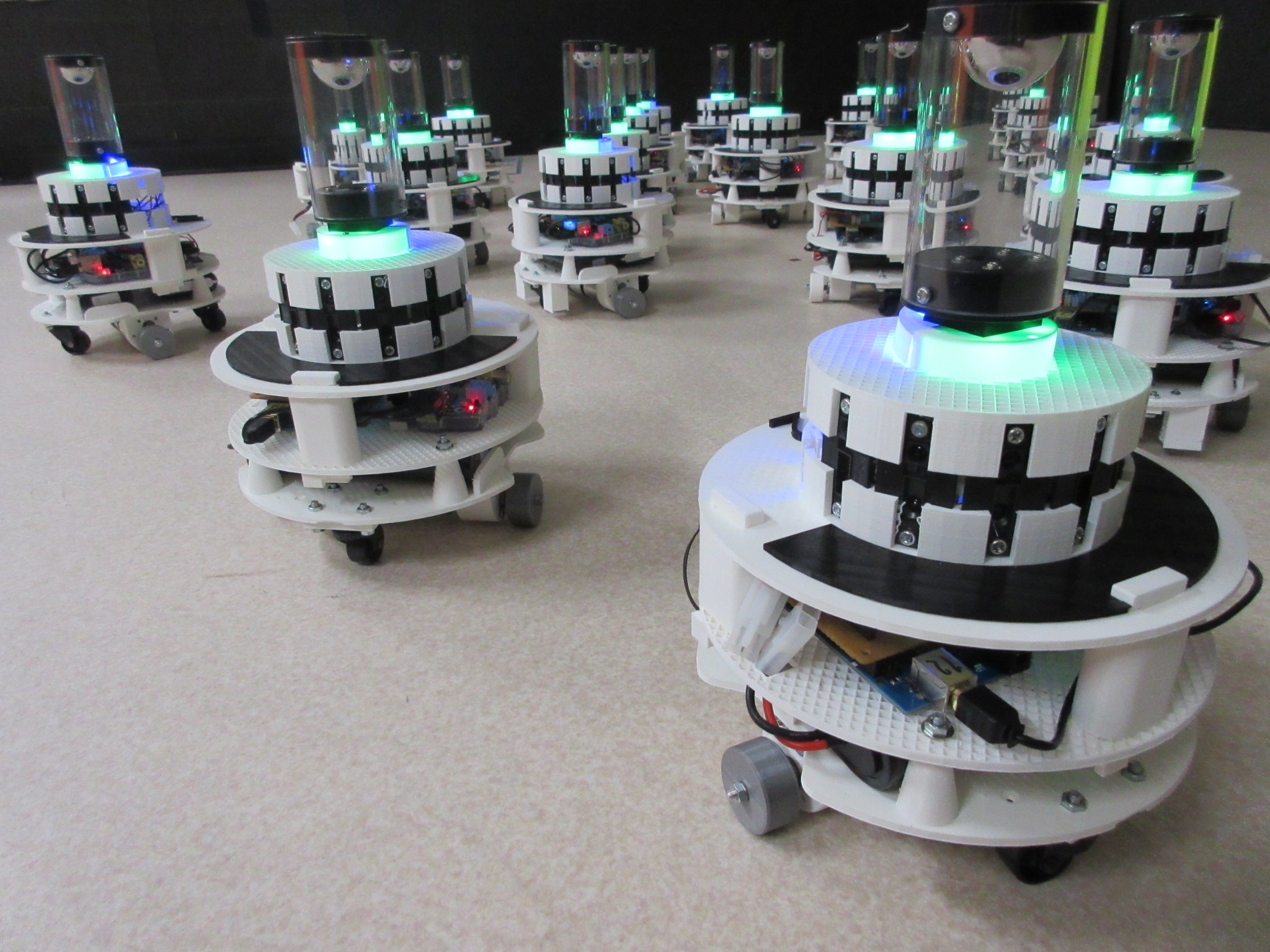
3Dプリンター製自律移動ロボット
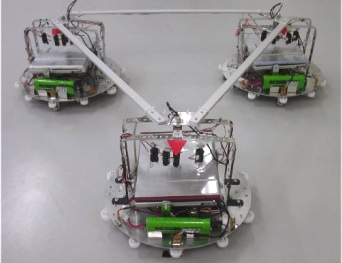
協調荷上げロボット
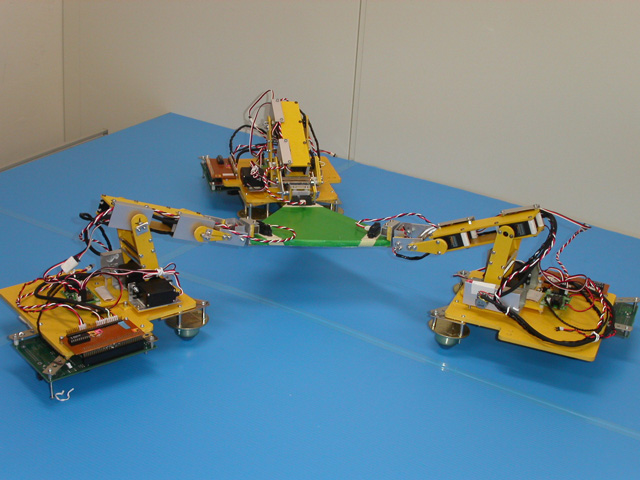
協調荷上げロボット
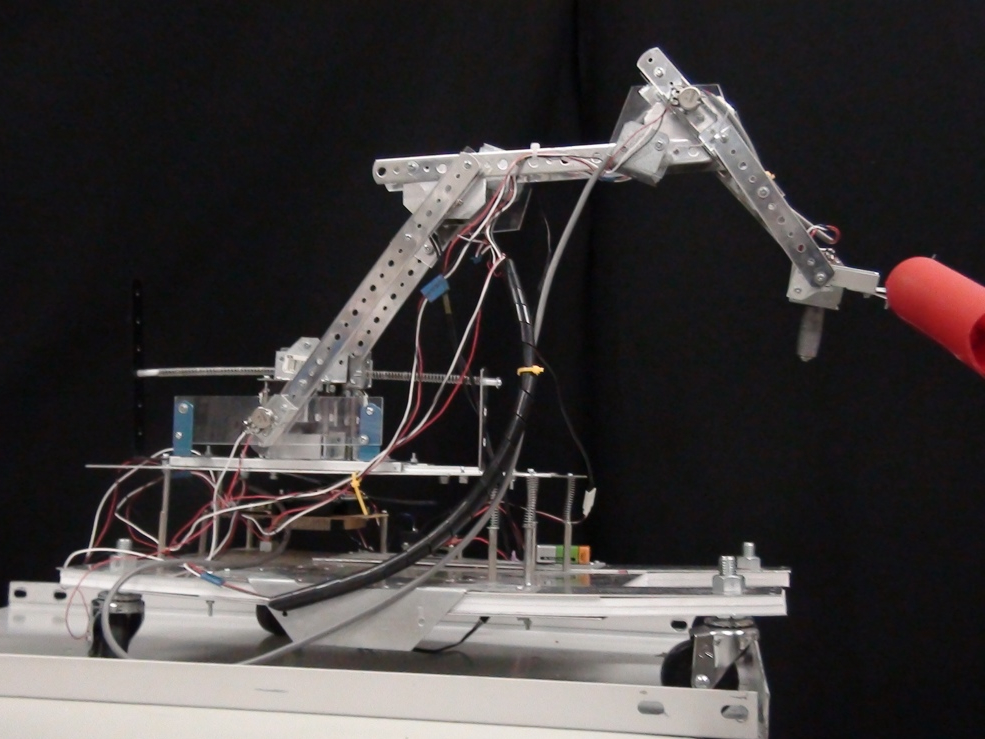
協調荷上げロボット
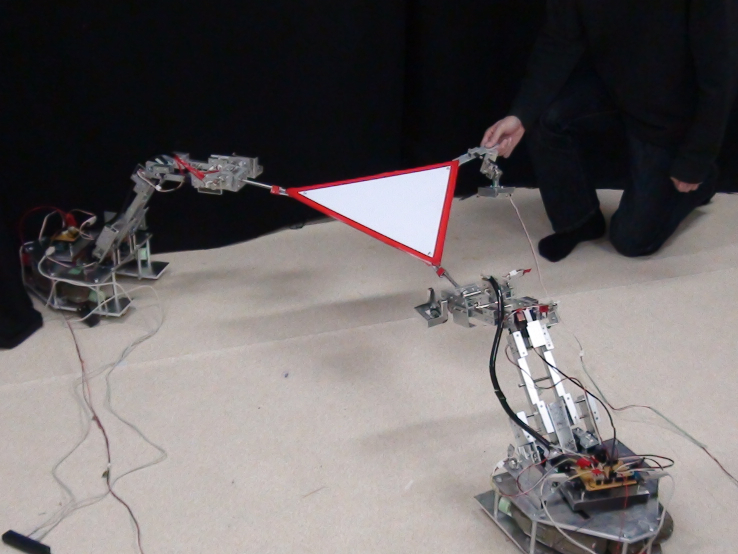
協調荷上げロボット OHK-ARM 2013
研究室の環境
学生部屋

本学生部屋の特徴として,土足での入室を禁止し,こまめに部屋の清掃を行っているため,部屋は非常にきれいです.また,部屋内にはお茶を飲んだり雑談ができるスペースを広く設けており,冷暖房も完備されているので,自宅で過ごすよりも快適な環境かもしれません.
本研究室に配属された学生は,一人につきMacとLinuxを一台ずつ使用することができます.さらに,GPUを使って研究を行う場合には,Windowsも使えます.複数のマシンを扱うことに始めは戸惑うかもしれませんが,先輩が指導するので安心してください.
計算機室
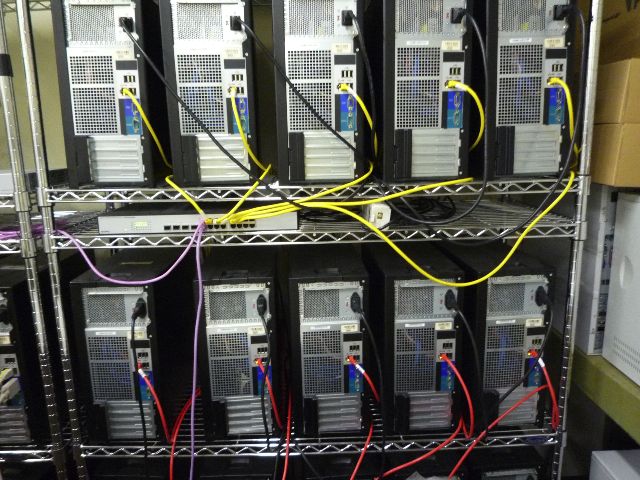
研究室内には常時稼働しているサーバーが数十台あります.多数のPCサーバが並列・分散処理を行うことで,高性能を低価格帯で実現できるPCクラスタを構築しています.クラスタシステム上でのプログラム実行の高速化が進んでおり,PC単体の性能向上も相まって,システムとしての処理性能は大幅に向上しています.
実験部屋

学生部屋の隣に併設されたこの部屋では,複数台のロボットの協調的振る舞いの獲得を目指して実験を行なっています.この実験で使用するロボットは既成品を購入したものではなく,自分たちで一から設計,製作したものです.基板の作製から電子部品のはんだ付け,CADによる設計から,部品の選定,組立まで,おおよそ一つの製品が完成するまでの工程を自分たちで担うことでロボットを製作しています.そのために必要な工具は一通り完備しています.
3Dプリンタ Ultimaker2
二台の3Dプリンタは実機ロボットの部品製作に活用されています. 3DCADなどのソフトウェアでデータを作成し,それを元に樹脂を何層にも重ねることで部品を作り上げます. 現在は部品の大部分を3Dプリンタで製作できるようになり,様々な形状の部品を比較的手軽に製作することができるようになりました.
New HTC VR & PS4 VR

今年から購入したHTC hive VR & PS4 VRによりVRの環境で実験が出来るようになりました. SteamVRを用いてロボットを触ったり、ターゲットを移動したり、もっと複雑な環境でロボットを訓練して、より頑丈なアルゴリズムを開発することができます.